
Un robot insecto con neuronas que no para
Un equipo de investigación de las universidades de Sevilla y Cádiz ha desarrollado NeuroPod, un autómata que simula la actividad de un insecto de seis patas. El modelo que anda, trota y corre utiliza materiales eficientes y económicos. Puede servir de base en la creación de prótesis o estructuras para la rehabilitación de lesiones medulares con un coste menor que las actuales.
Desde que en 1927 Fritz Lang nos mostró en Metrópolis un mundo en el que conviven personas y robots inteligentes, capaces de iniciar una revolución, han sido multitud los directores que han colocado a las máquinas como protagonistas de sus filmes. Criados, policías, incluso limpiadores de planetas han inundado las pantallas. Tampoco han faltado animales robóticos que desafían las capacidades de cualquier humano. Así, se han visto en el celuloide a tigres gigantescos, pitones asesinas, escarabajos carnívoros y arañas espías capaces de identificar a una persona mediante la lectura del iris.
Aunque aún no han llegado esos robots a la realidad, ya son varios los animales robóticos que pueblan las estanterías de jugueterías o son utilizados como cámaras de vigilancia, los cocodrilos de la BBC, por ejemplo, o los que plantean los investigadores para salvamento o ayuda domiciliaria. En esta línea, un equipo de investigación de las universidades de Sevilla y Cádiz ha desarrollado un insecto robotizado que incluye un sistema que podrá servir en la creación de prótesis más exactas y precisas.
Se trata de la primera implantación de este tipo de un sistema de impulsos motores con respuesta en tiempo real y se basa en una red neuronal artificial con estructura y diseño basados en los modelos biológicos nerviosos. Tal como indican en el artículo publicado en la revista Neurocomputing el robot reproduce el paso, trote y carrera de un insecto sin que pierda el equilibrio y sin tiempos intermedios en el cambio de ritmo, como ocurre de manera natural en un ser vivo. Se llama NeuroPod, replica movimientos reales ante estímulos externos con un consumo energético mínimo y reduce el tiempo de computación.
De derecha a izquierda Juan Pedro Domínguez, Alejandro Linares y Daniel Gutiérrez, algunos autores del artículo.
El insecto, funciona casi como un ser vivo real. En él aplican la ingeniería neuromórfica que unifica la biología, la física, las matemáticas, la informática y la electrónica. “El problema hasta el momento es que entre la orden y la respuesta existe un tiempo de espera que impide un cambio natural en los ritmos. Hemos logrado que NeuroPod cree un nuevo compás ante un impulso que vuelve a mantenerse constante sin paradas”, afirma a la Fundación Descubre el investigador de la Universidad de Sevilla Daniel Gutiérrez, autor del artículo.
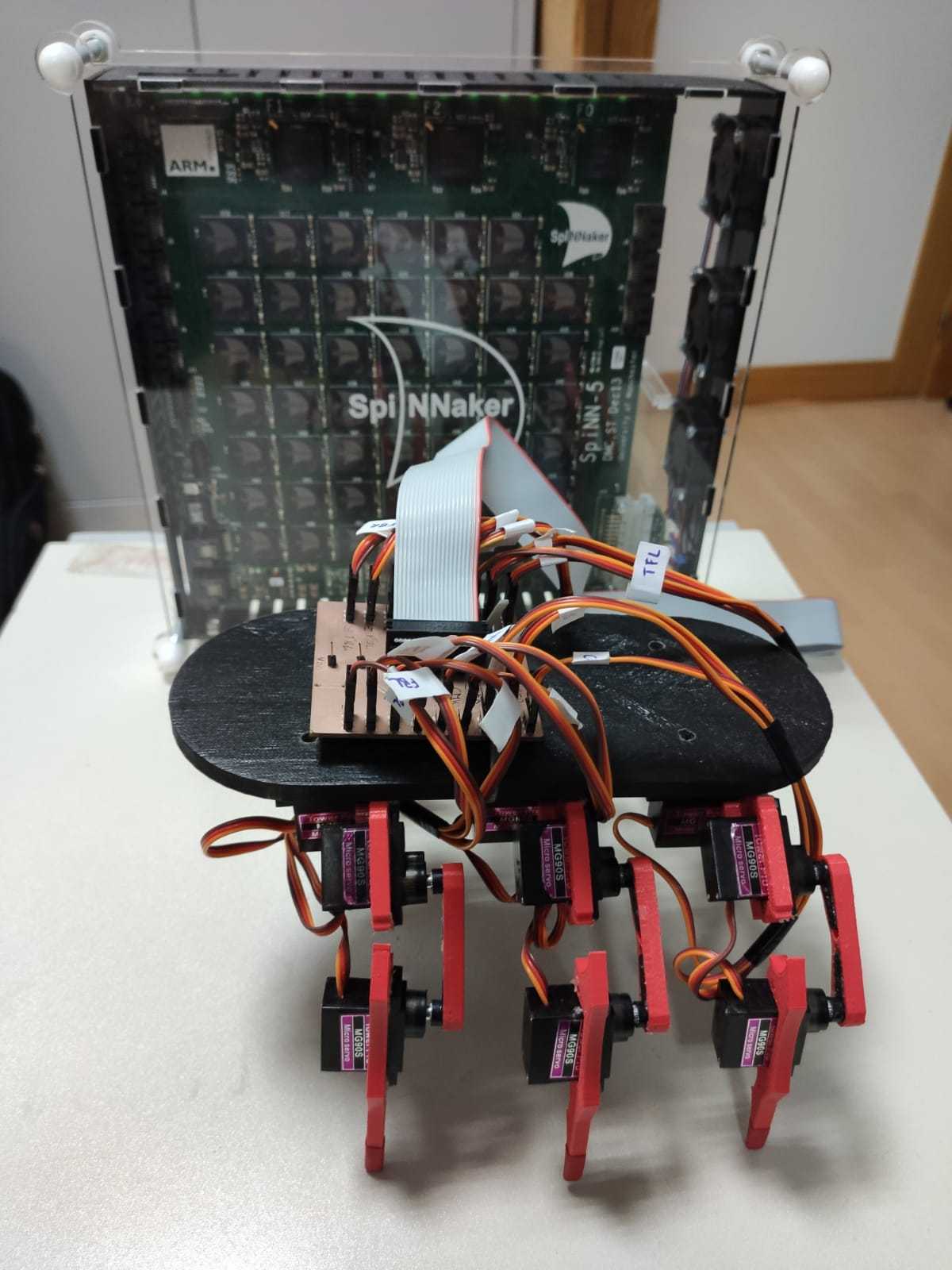
El esqueleto del insecto está creado con impresión 3D y contiene 18 servomotores, que simulan lo que sería el sistema nervioso y motor. Son dispositivos con un decodificador que convierte el desplazamiento mecánico en pulsos digitales interpretados por un controlador de movimiento.
El sistema utiliza solamente 30 neuronas artificiales, un número inferior a otros modelos similares, y relaciona su actividad con el movimiento. Así, simulan tres movimientos diferentes en insectos: andar, trotar y correr. Por otro lado, el modelo permite añadir sensores auditivos y visuales. De esta manera, el robot podría responder ante un sonido concreto o una imagen determinada.

Descripción de las partes que conforman este autómata.
En el organismo, la médula espinal crea pautas de movimiento como las que se producen al respirar, correr o nadar. Por su parte, las neuronas humanas funcionan mediante estímulos eléctricos o químicos que provocan la transmisión de información al resto del cuerpo.
Una médula espinal de ceros y unos
El robot también contiene un generador de patrones centrales (CPG) que ordena los cambios de ritmo a los diferentes sistemas. Estos responden modificando la velocidad o intensidad de la acción concreta de manera inmediata. Además, las neuronas artificiales reciben un estímulo, en este caso codificado en lenguaje informático, procesan la información y producen una respuesta. Así se crean nuevos desplazamientos rítmicos ante un estímulo concreto sin tiempos de retardo.
El hecho de que estos tiempos de parada se anulen prácticamente es de interés para su aplicación en prótesis, como brazos robotizados, en las que la continuidad de movimientos es de especial importancia para evitar los errores de precisión y estimular la exactitud en la acción. También en respiradores autómatas ya que se consiguen cambios de ritmo de una manera natural y sin retardos cuando se necesite una mayor o menor ventilación.
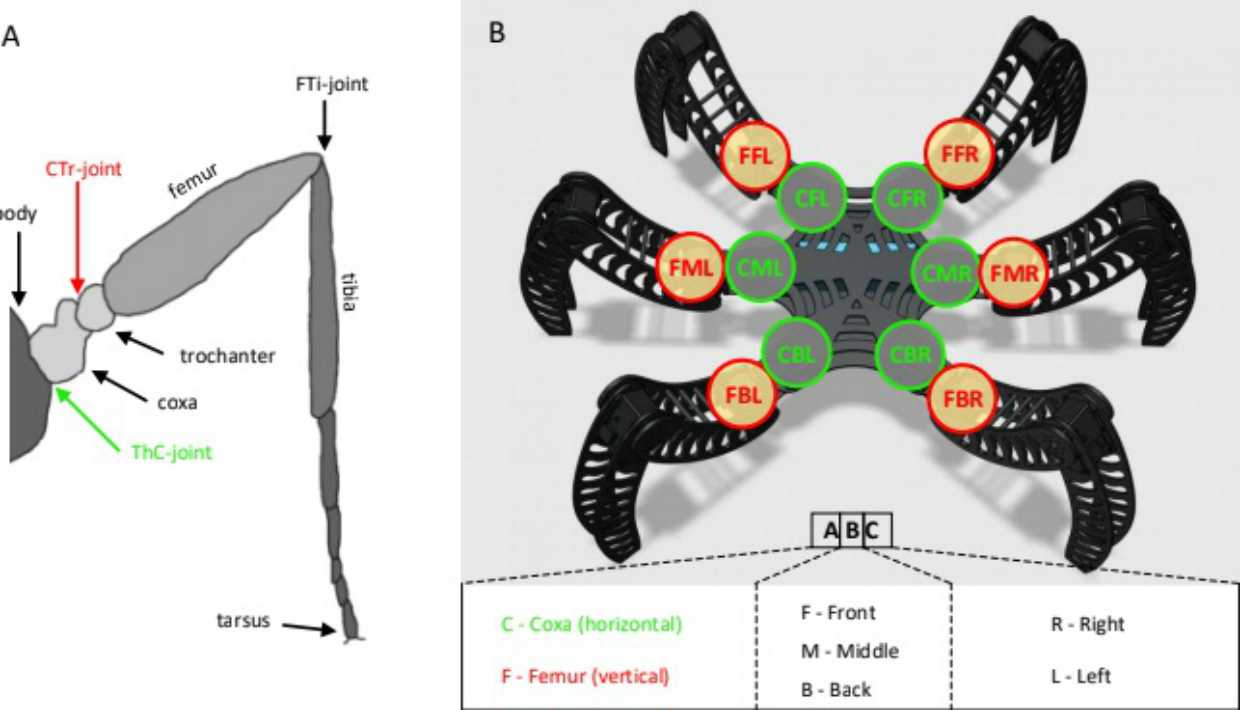
Diagrama de bloques del sistema.
Esta característica puede enfocarlo también para la creación de autómatas que respondan ante una señal visual o auditiva y modifiquen su patrón inmediatamente de una determinada manera, sin necesidad de ninguna acción externa. Esto supone un paso más en la búsqueda de un robot independiente que facilite y complete el trabajo del ser humano.
Aunque en cualquier creación no deben olvidarse las tres reglas de la robótica que Isaac Asimov promulgó, también en el siglo pasado como Lang, con su particular visión del futuro con un mundo en el que personas y androides conviven. En él, se partían de las premisas que cualquier robot debía cumplir resumidas en la que llamó la ley cero: “Un robot no hará daño a la Humanidad o, por inacción, permitir que la Humanidad sufra daño”. ¿Tendrá este insecto esta línea en su código binario?
Más información en #CienciaDirecta: Crean un robot-insecto con neuronas artificiales que modifica el movimiento en tiempo real ante un estímulo
Versión en inglés: Development of an insect-like robot with artificial neurons that modifies its movements in real time in response to a stimulus


Suscríbete a nuestra newsletter
y recibe el mejor contenido de i+Descubre directo a tu email
