
Diseñan un robot que sabe dónde pisa
Un equipo de investigación de las universidades de Sevilla y Cádiz ha diseñado una arquitectura de inteligencia artificial para patas robóticas que detecta el tipo de suelo y adapta la velocidad y ritmo en la pisada, como lo haría un humano. Los resultados del trabajo permitirán mejorar el funcionamiento de máquinas como las dedicadas a exploraciones de zonas de difícil acceso.
Día de senderismo con los amigos. De repente oímos gritos de auxilio. Seguimos la voz que requiere nuestra ayuda. Provienen de una pequeña gruta que sale a nuestro paso. Ni siquiera el ‘canijo’ de Jaime cabe por la minúscula entrada. Llamamos a emergencias y en poco tiempo aparece entre nosotros un robot cuadrúpedo que se desliza caverna abajo guiado por la llamada del montañero en apuros. Miramos alrededor por si alguien lo controla, pero no, viene solo. Da un traspié al resbalar con el agua que hay en el suelo, pero inmediatamente, recupera el ritmo y va en busca de quien ha quedado atrapado.
Esa imagen de ciencia ficción aún hoy día es la que puede suscitar la nueva creación de un equipo de investigación de las universidades de Sevilla, Cádiz y Guanajuato de México. Los expertos han presentado en un artículo publicado en la revista Neurocomputing, un sistema que permite que un robot modifique su movimiento dependiendo de la estabilidad y firmeza del suelo que pisan, como haría una persona.
Un ‘pie’ muy listo
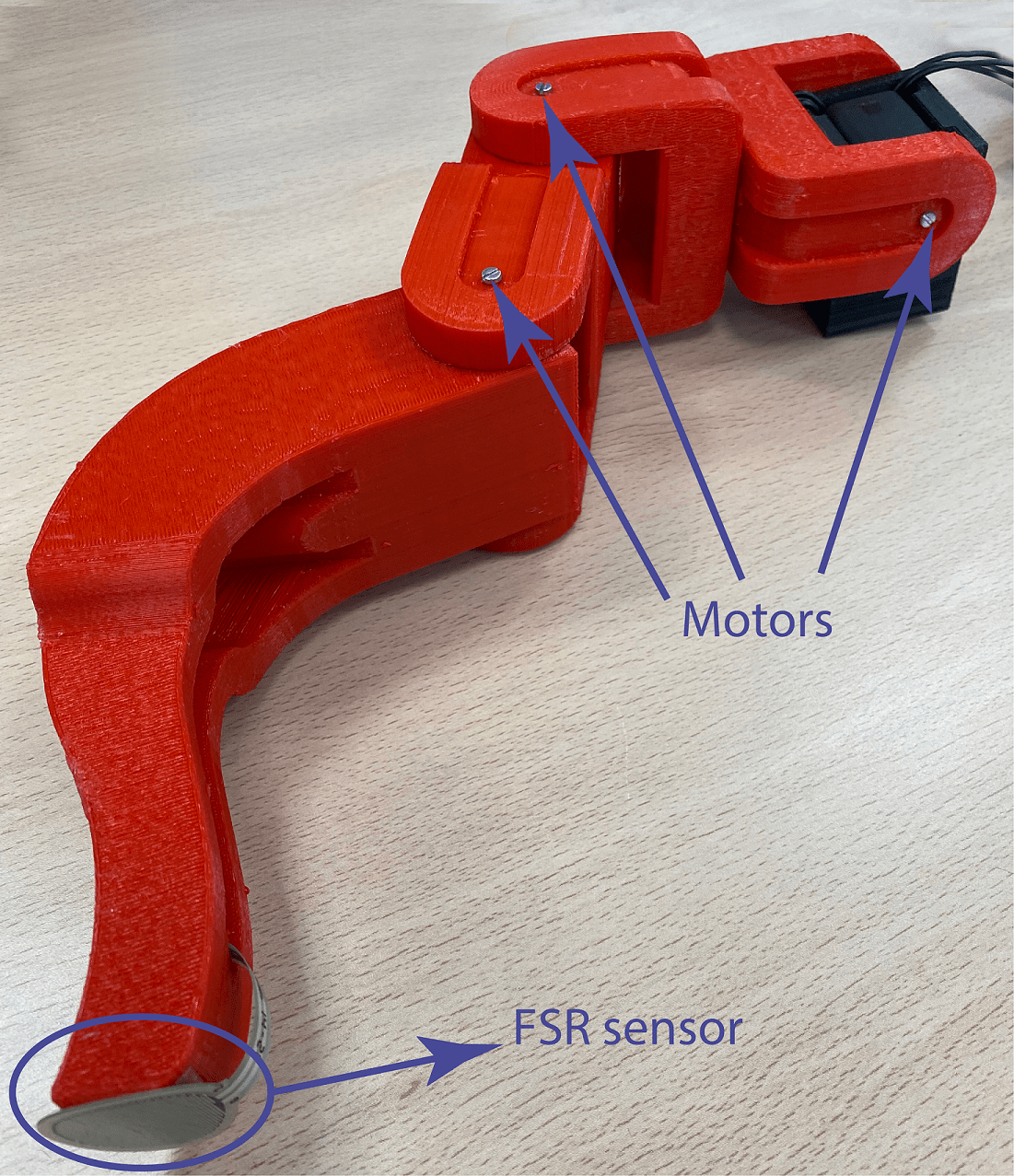
Este pie ‘inteligente’ para robots exploradores está basado en una red neuronal artificial que emula la forma de pensar natural y que se relaciona con su entorno mediante sensores sobre el terreno. El dispositivo adapta su movimiento según la estabilidad del suelo, como un humano y se puede aplicar a distintos tipos de robots.

El dispositivo adapta su movimiento según la estabilidad del suelo mediante sensores.
Los expertos parten de estudios previos en inteligencia artificial basadas en redes neuronales pulsantes (SNN, Spiking Neural Networks). Éstas trabajan de una manera similar a como lo hacen las neuronas en el cerebro. Se comunican mediante estímulos eléctricos, compartiendo información para ordenar la ejecución de las distintas funciones en el organismo.
Mediante unos sensores que miden la presión que ejerce el autómata al caminar, el sistema responde adaptando el movimiento a cada situación para no perder el equilibrio. “Hemos conseguido desarrollar el primer generador de patrones centrales bio-inspirado, es decir, que simula el pensamiento humano, y que provoca el cambio en los movimientos de cualquier robot, independientemente del número de patas que tenga. Se logra con tan solo un mecanismo de adaptación de poco consumo energético y económico”, indica a la Fundación Descubre el investigador de la Universidad de Sevilla, Juan Pedro Domínguez, autor del artículo.
Equipo de investigadores de las universidades de Cádiz y Sevilla, responsables del estudio.
Como ocurre en el organismo, donde el cerebro recibe los estímulos externos y provoca una respuesta en el aparato locomotor, esta estructura cuenta con un generador de patrones centrales (CPG) que recibe la información del sensor colocado en las patas y da la orden de bajar la velocidad o el ritmo de paso para adecuarse a las nuevas circunstancias. Esto puede ser de especial utilidad en robots dedicados a rastrear o reconocer lugares de difícil acceso o en condiciones en las que el ser humano no puede llegar.
Robots que sienten
La ingeniería neuromórfica imita parte del cerebro mediante circuitos eléctricos y algoritmos. Son placas electrónicas que cuentan con un decodificador y un controlador que interpretan el estímulo, en este caso, la presión del terreno, y lo convierte en pulsos digitales. La red neuronal pulsante de este trabajo conecta a 5 poblaciones de 100 neuronas cada una, lo que facilita la aplicación del sistema en diferentes máquinas al ser más reducida que otras similares.
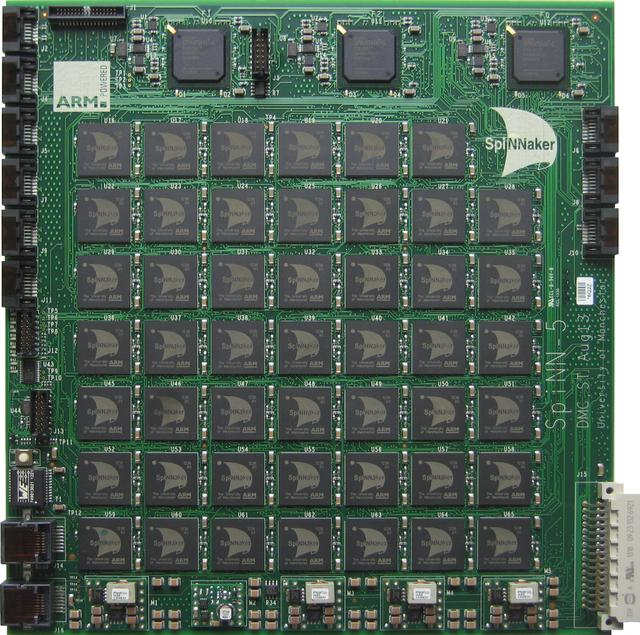
El generador de patrones centrales imita parte del cerebro mediante circuitos eléctricos y algoritmos.
Además, la red utilizada para el desarrollo de la arquitectura es la conocida como red neuronal pulsante, actualmente la más parecida a las biológicas, y que incorporan, a diferencia de otras utilizadas en inteligencia artificial, el concepto de tiempo. De esta manera, no se producen retardos en los cambios de frecuencia y ritmo, realizándose el proceso de una manera natural, como lo haría una persona.
Una pata y algo más
Los ensayos se han realizado en una sola pata robótica en la que han confirmado la idoneidad del sistema para su implantación con el sensor de presión del terreno, pero también lo proponen para su uso con otro tipo de estímulos externos como podría ser la temperatura o un sonido. Así se podrían configurar los robots para que aumenten la velocidad de marcha ante una señal acústica, como podría ser una sirena, o ante una fuente de calor.
Actualmente, trabajan en el montaje del sistema en robots reales de distinta morfología, desde bípedos a hexápodos. Además, el estudio abre la puerta para que el sistema cuente con la opción de ir aprendiendo de su propia experiencia, una línea conocida como Deep learning o aprendizaje automático. Es decir, en el supuesto de algún fallo, la red neuronal asimila el error y propondría otra actuación si volviese a presentarse el mismo problema.
Con esto, se da un paso más en robótica para que Isaac Asimov se convierta en el nuevo Julio Verne. Quizás las andanzas de esta pata desemboquen en el robot de salvamento descrito al inicio, o en el Yo, robot que auguró el escritor en 1950. Aún le queda camino que recorrer a la inteligencia artificial para llegar a ello, pero cada paso que da, como el realizado por estos investigadores, acerca esa imagen de película a la realidad.
Más información en #CienciaDirecta: Diseñan un pie ‘inteligente’ para robots exploradores

Suscríbete a nuestra newsletter
y recibe el mejor contenido de i+Descubre directo a tu email
