
La próxima generación de robots sociales de asistencia se desarrolla en la Universidad de Málaga
Investigadores de la Escuela de Telecomunicación dotan a estos sistemas autómatas de capacidades ‘autoadaptativas’, en el marco del proyecto CAMPERO.
Un equipo científico de la Escuela de Telecomunicación de la Universidad de Málaga trabaja en el desarrollo de la próxima generación de robots sociales de asistencia en busca de mejorar y evaluar sus capacidades ‘autoadaptativas’. En el marco del proyecto nacional de I+D CAMPERO -recién finalizado, con una dotación presupuestaria de cerca de 200.000 euros-, el objetivo de esta investigación es comprobar a largo plazo cómo afecta a la aceptación, usabilidad, accesibilidad y funcionalidad el hecho de que un robot social de asistencia sea capaz de adaptar su comportamiento a cada persona y contexto.
Para ello se ha instalado un robot en la residencia ‘Vitalia Teatinos’, donde sus usuarios han sido los encargados de valorar durante seis meses su propia experiencia con estos sistemas autómatas.
“Hemos conseguido que este robot ande en la sala común de la residencia más de 40 kilómetros con tareas múltiples como recoger las opciones de menú semanal o participar en sesiones de terapia musical”, explica el profesor del Departamento de Tecnología Electrónica, Juan Pedro Bandera, quien junto con la profesora Rebeca Marfil, de la misma área, lideran este estudio.
Igualmente, para el desarrollo de este trabajo se ha contado con otros robots utilizados en proyectos anteriores, así como un ‘living lab’ o apartamento adaptado en las instalaciones del grupo de investigación de la UMA TIC-125 en la ETSI de Telecomunicación, que permite probar tanto los robots como los sistemas emplazados en un entorno inteligente.
Dos niveles de adaptación
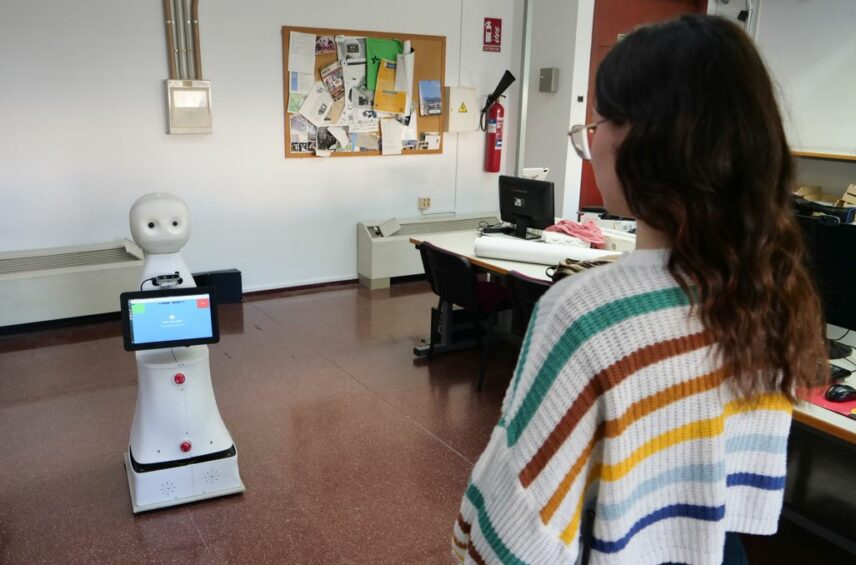
En concreto, la adaptación del robot social se hace en dos niveles: en primer lugar, el robot es capaz de seleccionar qué tarea realiza en cada momento y, en segundo, el robot adapta la ejecución de cada tarea, según el contexto y la persona con la que interactúa.
“Por ejemplo, para una persona que no oye bien, el robot puede hablar más alto o comunicarse a través de subtítulos mostrados en su pantalla táctil, es decir, que su respuesta depende de la situación en la que se encuentre”, aclara Juan Pedro Bandera, quien añade que estas funciones, y la forma en las que el robot las hace, han sido co-creadas en grupos de trabajo que incluyen, además de ingenieros a sociólogos, antropólogos y, también, a los usuarios -residentes, terapeutas, cuidadores…-.

Equipo científico de la Escuela de Telecomunicación de la UMA que ha llevado a cabo el proyecto.
Actualmente, los investigadores de la Universidad de Málaga están completando estas evaluaciones con entrevistas y recopilando los resultados obtenidos para nuevos proyectos y artículos científicos. Como próximos pasos, se empieza a explorar las vías para hacer que el robot no solo modifique su comportamiento de forma autónoma, sino que además pueda explicarlo en un lenguaje natural.
En suma, avanzar de la mano de la Inteligencia Artificial y la Robótica hacia robots de asistencia conscientes de su contexto social, accesibles, aceptados y útiles.
CAMPERO -Capacidades autoadaptativas para mejorar la próxima generación de ecosistemas de vida asistida usando robots sociales- ha tenido una duración de dos años y ha contado con la participación de la Universidad de Extremadura, que también dispone de dos robots y un apartamento adaptado. Se trata de un proyecto multidisciplinar que agrupa a cinco investigadores de la UMA y a diez de otras universidades, instituciones y empresas de robótica europeas.


Suscríbete a nuestra newsletter
y recibe el mejor contenido de i+Descubre directo a tu email
